
Vorgeschichte zur Dampfmaschine
Schon in der Antike wurden die Kräfte des Wasserdampfes von dem Griechen Heron von Alexandria entdeckt. Der Nutzen der Dampfkraft wurde jedoch noch nicht erkannt. Erste verwendbare Dampfmaschinen wurden um 1712 gebaut, jedoch mit mäßigem Erfolg.
Um 1769 schließlich patentierte der Engländer James Watt eine Maschine mit stark verbesserten Wirkungsgrad. Watt entdeckte schließlich den Nutzen der Dampfexpansion.
Um die Kräfte seiner Dampfmaschine besser darzustellen, erfand Watt, die heute noch gültige Bezeichnung Horsepower (HP) oder Pferdestärke (PS).
Damals glaubten viele Menschen, dass mithilfe der Dampfkraft nicht nur Eisenbahnen, Dampfwalzen und Traktoren, sondern auch Flugapparate wie Zeppeline, gewaltige Luftschiffe, Flugzeuge oder gar Raketen und Raumschiffe bewegt werden können. (Ähnliches war auch in den 1930ern – bis in die 1970ern Jahren nach Entdeckung der Atomkräfte zu beobachten und brachte u.a. eine riesige Pracht sowie Vielzahl an unglaublichen Spielzeugen hervor.)

So waren auch die phantastischen Romane von Jules Verne oder H.G. Wells von diesen Vorstellungen getragen. Diese spezielle Form der Science Fiction Literatur umschreibt man heute als „Steampunk“.
Der Dampfroboter
Inspiriert von diesen alten Klassiker und als passionierter Blechspielzeug Sammler beschäftigte ich mich schon lange, mit der Idee bzw. der Herstellung eines mit Dampf angetrieben Roboter.
Schließlich gibt/gab es Blechspielzeuge mit Feder – und Uhrwerkantriebe, sowie Batterieantriebe – jedoch eine Laufmaschine mit Dampfantrieb aus einer Serienproduktion kannte ich nicht.
Und so reifte die Idee immer weiter, auch Dank der Hilfe und Unterstützung seitens Herrn Thomas Schröder (ehem. Geschäftsführer der Fa.Wilesco) den ich nach einigen Zögern von diesem Projekt überzeugen konnte. Denn ohne das Know-how und die Nutzung des Teilebaukastens von Fa.Wilesco war ein solches Unterfangen mehr als schwierig.
Unzählige Prototypen wurden getestet, Getriebeübersetzungen, Kesselvolumen abgestimmt, gefeilt, gesägt, gedengelt, gebohrt und gebogen bis die Herausforderung mit viel „Herzblut“ endlich gemeistert wurde.
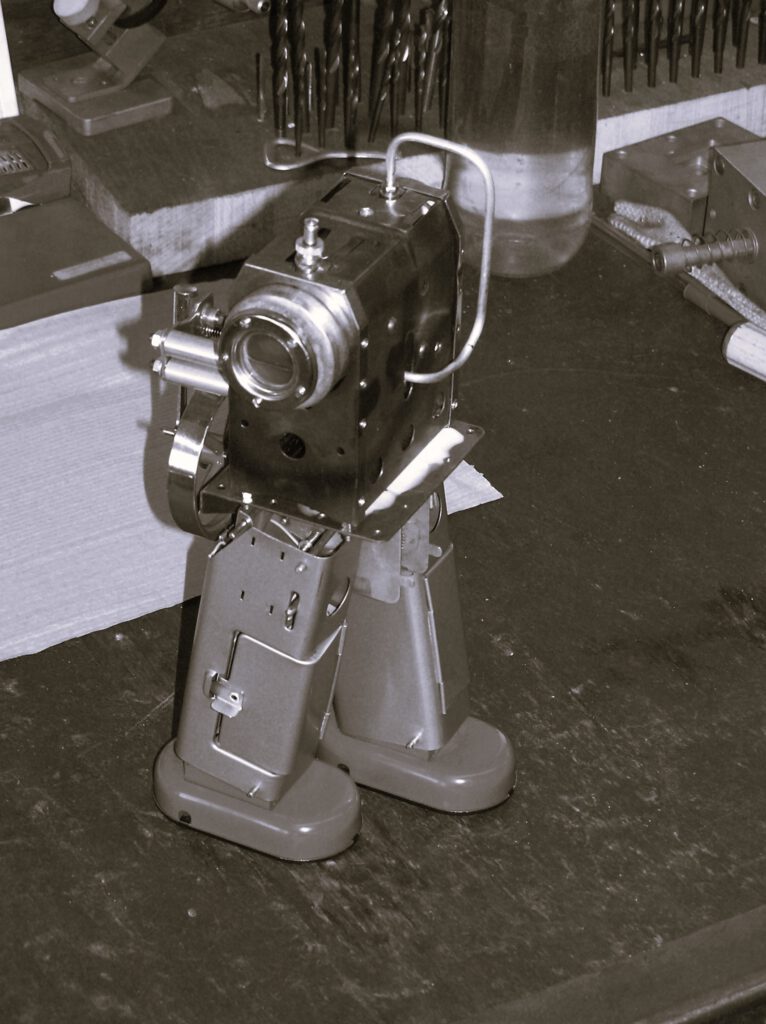
Das Ergebnis der Dampfroboter Strenco ST. – 2 eine absolute Neuentwicklung.
Die erste Serie des ST.-2 wurde in 2007 produziert und 300 Roboter wurden weltweit ausgeliefert.
Aufgrund der vielen Anfragen, die mich in den letzten Jahren bezüglich einer Produktion einer Neuauflage erreichten, haben wir uns entschlossen eine letzte Serie von 150 Roboter zu produzieren. Da unser Dampfroboter erst in den letzten Jahren hier an Bekanntheit gewann und ein entsprechendes Verlangen auslöste, sind diese Anfragen zumeist aus dem Bereich der Dampfmaschinenfreunde gekommen.
Der Dampfroboter wird in unserer Manufaktur im pfälzischen Carlsberg montiert.

Der komplette „Körper“ bzw. das Gehäuse besteht aus lackierten Stahlblech. Die einzelnen Teile der Dampfmaschine sind aus Messing angefertigt und allesamt fein vernickelt.

Der Messingkessel wird bei Fa. Wilesco in Lüdenscheid in bekannter, bester Qualität von Hand gelötet und durchläuft anspruchsvolle Sicherheitsprüfungen, wie z.b. die Berstdruckprüfung (5Bar).
Jeder Dampfkessel wird mit einem verstellbaren Sicherheitsventil aus nicht rostendem Material bestückt. Der Ansprechdruck für dieses Ventil liegt bei max. bei unter 3,0 bar (2-facher Betriebsdruck)
Nach der „Hochzeit“ bei der das Kesselgehäuse mit dem Laufgestell und der Dampfzylinder mit dem Schwungrad verbunden werden, wird eine erste Funktionsprüfung mit Druckluft durchgeführt.
Um den einwandfreien Zustand der Dampfmaschine zu erhalten, muss der „Maschinist“ oder Anwender die Sicherheitsanweisungen gemäß der Bedienungsanweisung beachten und befolgen.
so verbleibe ich und wünsche uns allen immer genügen Druck auf dem Kessel.
Ihr
Volker F.E.Strauss
Zur Funktionsbeschreibung
Der durch Wasser – im erhitzten Kessel – erzeugte Wasserdampf expandiert und wird durch die Dampfleitung zum Dampfzylinder gepresst. Der nicht selbst anlaufende Dampfzylinder wird dann durch ein kurzes „andrehen“ in Bewegung gesetzt und treibt somit das darunter sitzende Schwungrad unverzüglich an. Dieses wiederum sitzt auf der Antriebsachse, welche direkt in das Laufgetriebe eingreift und den Roboter schließlich mit hoher Drehzahl zum Laufen bewegt.

Technische Daten :
Stahlblech Roboter : Dampfantrieb
Farbe : Schwarz Matt Hochfester Thermolack
Höhe : 360 mm
Breite : 240 mm
Tiefe : 140 mm
Verpackung : Holzbox 365 x 280 x 190 mm
Gewicht : 2,7 KG
copyright by Strenco – Strausstoys